Researchers at the University of California San Diego have developed a magnetic tracking system for surgical robots to operate with dexterity within the body. The technology does not require patient or clinician exposure to radiation and is much less expensive that pre-existing monitoring techniques. A magnet is embedded in the tip of the robot and a series of sensors can track its location, while a neural network improves the accuracy of the tracking system.
“Continuum medical robots work really well in highly constrained environments inside the body,” said Tania Morimoto, a researcher involved in the study. “They’re inherently safer and more compliant than rigid tools. But it becomes a lot harder to track their location and their shape inside the body. And so if we are able to track them more easily that would be a great benefit both to patients and surgeons.”
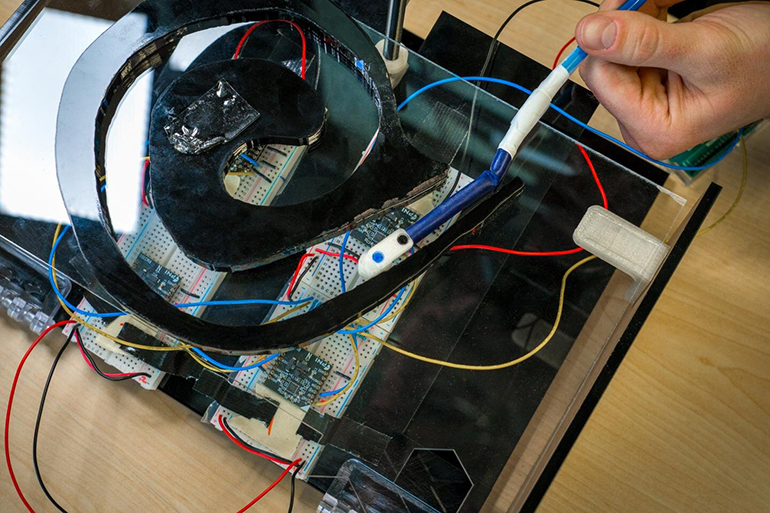
Current techniques to track such robots can involve X-ray exposure for medical staff and patients and can be expensive. This new approach developed by Morimoto and her colleagues is much less expensive, clocking in at approximately $100 for the required components, and does not require radiation. The system relies on the magnetic field produced by a magnet embedded in the tip of a flexible surgical robot.
Four sensors can detect this magnetic field when they are placed at specific locations near where the robot is operating, and a computer model then predicts the location of the robot based on this sensor data. The computer system development involved using a neural network to determine the difference between the actual and theoretical sensor values, which helped the researchers to improve the accuracy of their system.
So far, the research team has tested the system using a specific type of soft robot that can navigate delicate areas in the body as it is flexible and applies very little pressure to the structures it encounters. “We worked with a growing robot, which is a robot made of very thin nylon that we invert, almost like a sock, and pressurize with a fluid which causes the robot to grow,” said Connor Watson, another researcher involved in the project. “Because the robot is soft and moves by growing, it has very little impact on its surroundings, making it ideal for use in medical settings.”